
1
机器人应用场景:机械义肢相关文章
HACKberry仿生学手臂,还可以是你的炒菜帮手
灵感来自《杀出重围》的机械义肢Hero Arm
2
机器人组成单元:驱动器相关文章
腿足式机器人常见驱动器方案汇总介绍
一种带力矩、位置传感器的SEA驱动器机械设计方
3
LAIR相关知识分享
几种不同四足机器狗腿部结构分析
机器人应用场景:机械义肢相关文章
HACKberry仿生学手臂,
还可以是你的炒菜帮手
转载:https://bbs.xianjichina.com/forum/details_163383时间:2019-03-21
作者:离弦箭
整理:江微杰
(本文转载/整理自相关链接,仅做内部知识共享和交流,不做商用;转载文章不代表本刊态度,部分内容若有删改,均为便于阅览所用,原文大意并无改动;如有侵权,请联系本刊删除。)

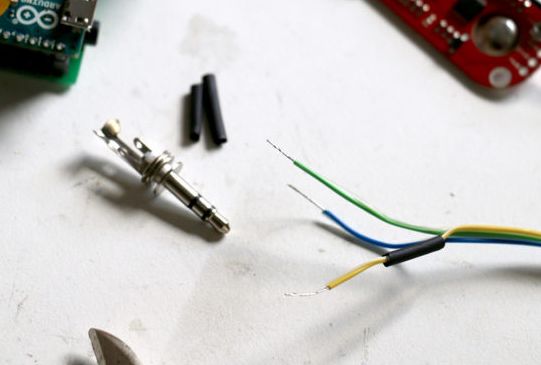
对于上肢残缺的人群来说,拥有一款仿生学手臂是一件难得的事情。但是在过去数十年,仿生学手臂高昂的价格也让大家望而却步。上肢比下肢精巧灵活,结构也较复杂,一般要求假手的外形、构造与人手相近。随着电子技术、生物医学工程的发展,假手已由装饰假手、机械牵引假手发展到肌电假手。肌电假手是大脑通过脊髓和神经系统向有关肌肉发出一组生物电脉冲,利用装在手臂皮肤表面的电极接受指令而驱动假手运动。这种假手受人的意志控制,能实现多功能的、与人手相似的动作。中国清华大学已于1983年研制出肌电假手。目前,一家名为exiii的日本公司就推出了这样一款性能惊人的3D打印仿生肌电假肢HACKberry 。这个产品的推出,使他们一举将设计界的IF、IDEA、红点三大奖项一并收入囊中。

该团队创始人 Genta Kondo 表示,HACKberry 原型机的成本只有 300 美元。实际上,现在装一个美容手也要1万多人民币;装一个只有2自由度的夹子也要3万元人民币。所以,5个自由度甚至及其以上的仿生手就更是天价——价格一般都至少要15000美元。

HACKberry有几个新的特点:1、它有着非常灵活的手腕和手指关节,这样就能执行更多的动作:灵巧地捏住树叶,连系鞋带这种精细活也同样能够完美完成。

2、HACKberry是通过 3D 打印机来制造的,有很多不同的设计可供不同情况的人进行选择,无论你想要一个橡胶材质还是内置电子模块的手指头,还是想要一个对于女性来说更具吸引力的秀气的手掌。

3、此外,它可以兼容数码相机上的电池,这保证了它具有较长的续航时间。
4、肌肉传感器使用Myoware:当肌肉收缩时,传感器会检测到该肌肉并将其转化为电能。通过这些传感器就可以对各个动作进行训练。
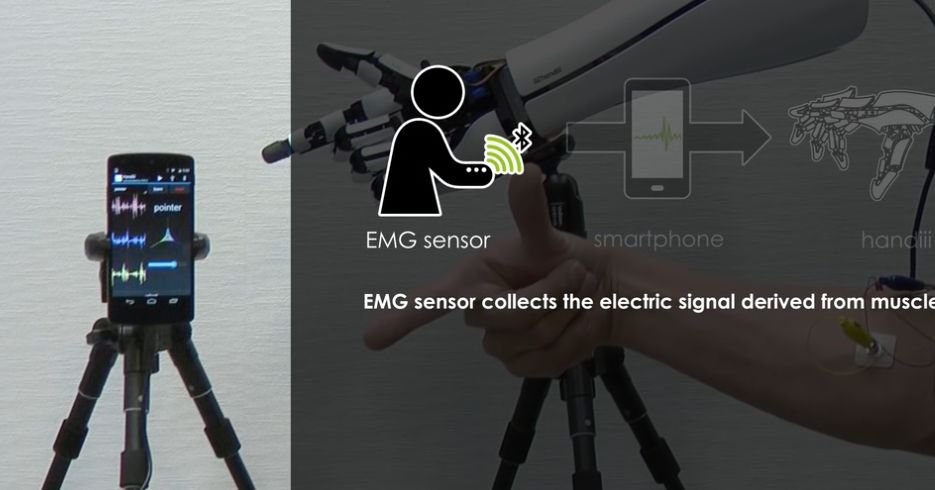
有意思的是,当正常人需要有第三只手比如炒菜的时候,HACKberry 手臂也可以放到墙壁上做帮“手”。此外,HACKberry可以通过无线网与智能手机相连接,从而借助手机的计算能力进行庞杂的运算,而不需要再内置专用计算机。这样创新性的设计同样为HACKberry降低低成本做出了巨大贡献。

Exiii 的核心团队来自于索尼和松下,三名创始人分别为软件工程师 Genta Kondo、机械工程师 Hiroshi Yamaura 和工业设计工程师 Tetsuya Konishi。他们一直都在用非营利性的方式来发展 HACKberry,其拥有两个平台:开源社区和本地社区,并且向全球开发者开放所有的数据和程序。Exiii公司不仅将源代码全部公开,而且将硬件的3D数据、手工基板数据、传感器基板数据等也公开,此外提供了完整的制作安装教程。官网:http://exiii-hackberry.com/GitHub源代码:https://link.zhihu.com/?target=https%3A//github.com/BaiXiongjun/HACKberry制作安装教程:https://myhumankit.org/en/tutoriels/myoelectric-exiii-hand/
机器人应用场景:机械义肢相关文章
灵感来自《杀出重围》
机械义肢Hero Arm
转载:https://baijiahao.baidu.com/s?id=1629941096523668891&wfr=spider&for=pc
时间:2019-04-05
作者:cnBeta
整理:江微杰
(本文转载/整理自相关链接,仅做内部知识共享和交流,不做商用;转载文章不代表本刊态度,部分内容若有删改,均为便于阅览所用,原文大意并无改动;如有侵权,请联系本刊删除。)

上世纪70-80年代长大的孩子们,或许幻想过自己如何成为像史蒂夫·奥斯汀(Steve Austin)那样的“仿生人”,即便这需要改造3/4的肢体、一只眼睛、以及600万美元。不过现在,Open Bionics为我们带来了更切合实际的选项,它就是3D打印的Hero Arm仿生义肢。该公司已经宣布在美正式开售,定制需要约40小时,售价为3000美元起。这是世界上第一个经过临床批准的3D打印的仿生手臂,具有多重抓握功能并赋予美学美感。Hero Arm是在英国布里斯托尔设计的轻巧且价格适中的肌电假体,现已在美国,英国和法国销售,适用于肘部以下截肢者和8岁及以上的人们。能够抓、捏、击掌、握拳和竖起大拇指。与其它仿生义肢相比,Hero Arm 的特色是能够快速装配打印,且配备了能够逼真地表达手部动作的肌电传感器。Open Bionics 表示,你可以毫不费力地控制仿生手,其具有直观且准确的精度。此外,Hero Arm 配备了触感震动、蜂鸣器、按键、以及灯光,能够为佩戴者提供直观的通知。

当然,这些仿生学手臂的作用不仅限于特殊人群身上。试想,若这些手臂真的走向市场并且达到大众可接受的价格范围,我们为什么不买一个机械手臂来为我们做一些额外的工作呢?在国外,已经有科研人员将意念控制与机械手臂结合制作出意念控制机械手臂。有了这样的手臂,你甚至可以躺在床上动动脑,就能够完成开门、开灯这些琐碎的小事。
机器人组成单元:驱动器相关文章
转载:https://zhuanlan.zhihu.com/p/32267807
时间:2017-12-27
作者:任赜宇
整理:江微杰
腿足式机器人
常见驱动器方案汇总介绍
(本文转载/整理自相关链接,仅做内部知识共享和交流,不做商用;转载文章不代表本刊态度,部分内容若有删改,均为便于阅览所用,原文大意并无改动;如有侵权,请联系本刊删除。)
设计能符合高度动态性能(Highly Dynamics)要求的腿足式机器人(Legged Robots)的驱动器(Actuator),一直都是目前机器人学术界的巨大挑战。
这篇文章会对目前学术界腿足式机器人常见的驱动器方案进行性能介绍与对比,并探讨未来的驱动器发展方向。在驱动器腿足式机器人三种常见的驱动器设计方案:1、常规方案;2、SEA ;3、本体驱动器;
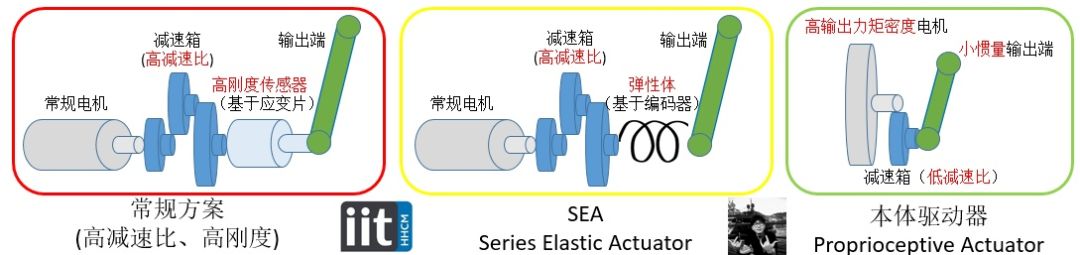
以下是对常见的驱动器设计方案特征及性能对比:
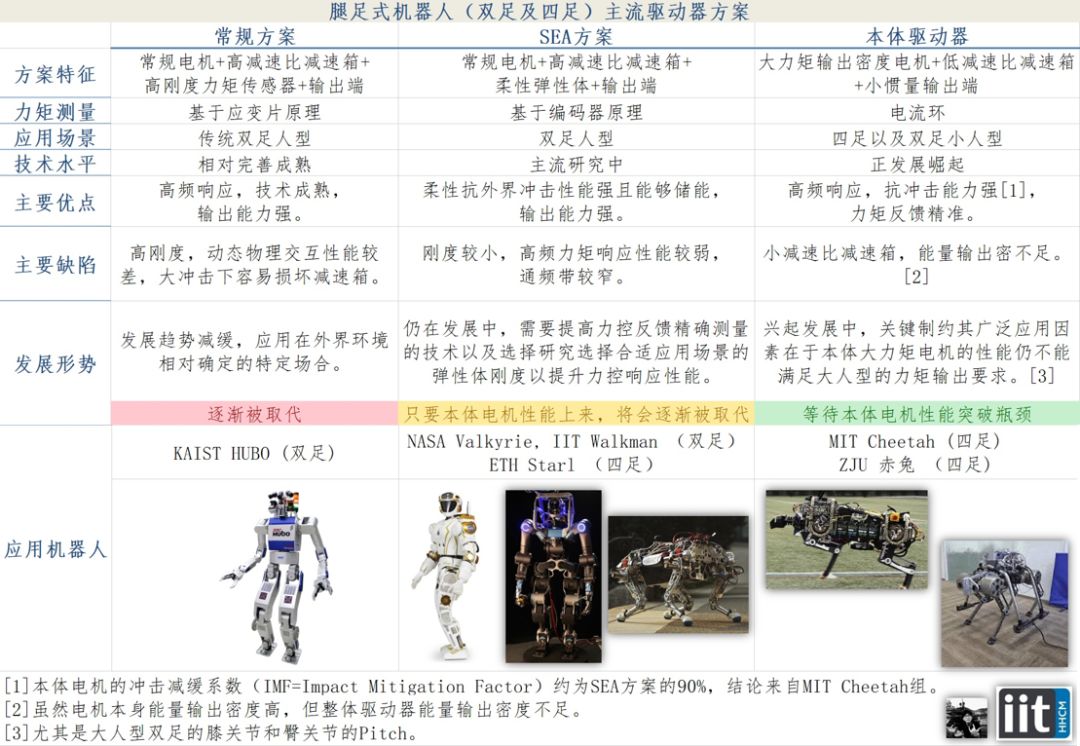
总结:1、动态物理交互能力的孱弱(具体指IMF: Impact Mitigation Factor)是常规方案将会被取代的主要原因;目前“大扭矩”电机(Motor)输出密度的不足是SEA不能被完全取代的主要原因;2、如果大扭矩输出电机能力提升到目前的3倍(即输出密度到达约80N·m/kg),SEA则将慢慢退出舞台。因为作者认为,SEA机械性能上的抗冲击和储能在本体驱动器方案的电机控制层面都能实现,系统的复杂性应该从机械层面移到电气层面;3、如果我们站的更高一点去看:所谓电机的普遍特性“高速低扭矩”其实并不太适合腿足式人型机器人的应用领域,而液压系统的特性则正好契合——波士顿动力。
关于制约本体驱动器方案发展的核心因素:驱动器输出密度
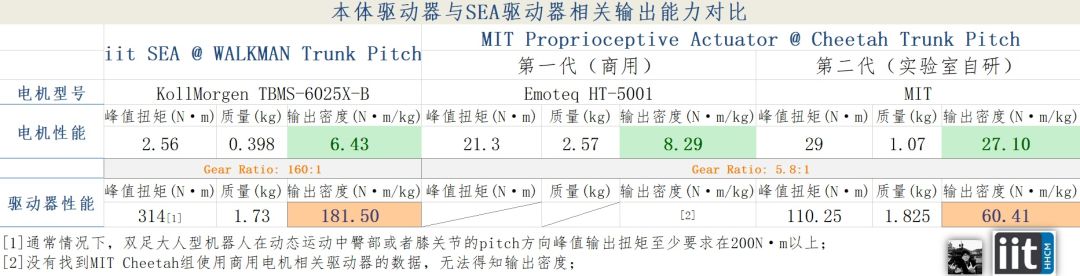
首先需要申明的是驱动器的输出密度和电机输出密度是两个不同的概念;我们可以看到MIT自己做的电机性能确实极强,能量输出密度是Kollmorgen电机的4.2倍,是大扭矩输出电机Emoteq的3.2倍,而这个电机是来自于MIT电气学院Jeffery H. Lang那里。专业的电机得去找专业具有电机背景的人去做,这点很重要;对比驱动器输出密度,我们就可以知道目前SEA还能存在的意义,减速箱的引入实实在在地极大提升了驱动器这个整体的输出密度(我指的是密度,并不是输出扭矩,注意)。而大减速比减速箱的引入带来的静摩擦力与非线性则否认了用电流环做力控的方案,引出了后续一系列SEA相关的问题。
机器人组成单元:驱动器相关文章
转载:https://zhuanlan.zhihu.com/p/32058061
时间:2019-07-26
作者:任赜宇
整理:江微杰
一种带力矩、位置传感器
SEA驱动器机械设计方案
(本文转载/整理自相关链接,仅做内部知识共享和交流,不做商用;转载文章不代表本刊态度,部分内容若有删改,均为便于阅览所用,原文大意并无改动;如有侵权,请联系本刊删除。)
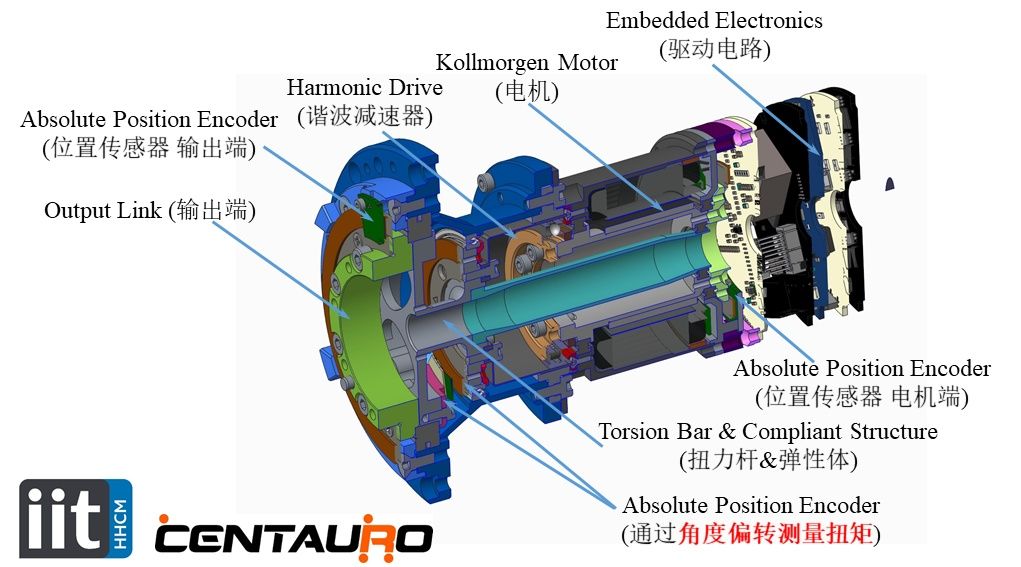
我们知道机器人平台上,在动态解耦(Dynamic Cou- pling)和运动、力控制的关键因素就是精确地传递力矩。传统的纯位置控制已经不能满足目前机器人动态运动性能控制的硬件需要,因此带精确力反馈的驱动器设计就迫在眉睫。而在人型机器人领域,对输出力矩、以及一定柔性(Comp- liance)的要求,决定了驱动器需要配备谐波减速器(Harmonic Drive)以及柔性体(Compliant Structure)。从左至右整个驱动器由以下五部分组成:输出端+弹性体+谐波减速器+电机+电路
这里需要着重解释的是:
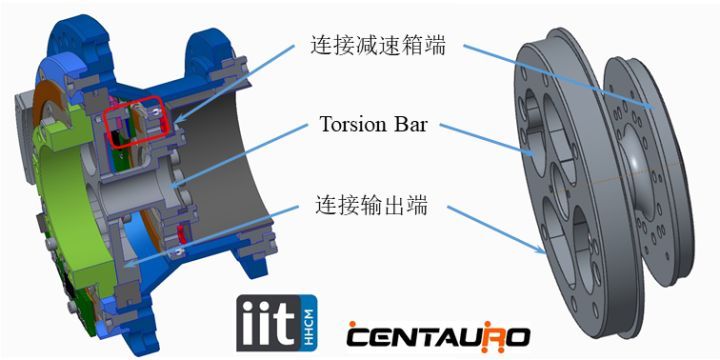
如上图,驱动器中的力矩是通过安装在弹性体两个平面(Interface)的位置传感器实现的,而这两个平面(Inte- rface)通过一个扭力杆(Torsion Bar)连接,这两个平面(Interface)一端连接着输出端(Output Link)另外一段连接在谐波减速器端(Harmonic Drive),当输出端驱动机器人关节运动时,这两个平面会在轴向(Axial)扭转产生一个偏角 (Deflection),而这个偏角 (Deflection)将会被位置传感器测量,通过: 得到力矩值。(为材料的抗扭截面系数,弹性体的材料为17-4PH)
(这里并没有采用应变片(Strain Gauge)原理测量扭矩,之后也会写篇文章介绍为什么最终选择位置传感器原理(Position Encoder)的原理测量扭矩以及关节零部件Torsion Bar设计的Trick)第二代SEA集成做了3种Size,如下图所示:


LAIR相关知识分享
几种不同四足机器狗腿部结构分析
作者:江微杰
LAIR(杭州)双周刊之前对部分电机进行了介绍,同时也提到了实验室最近在进行的机器人项目,包括“机械狗”。因此本期我们就对当下“电机驱动类”知名度较高的几款“四足机械狗”就其腿部结构和运动性能进行简单的梳理和对比分析。一、Standford Doggo:
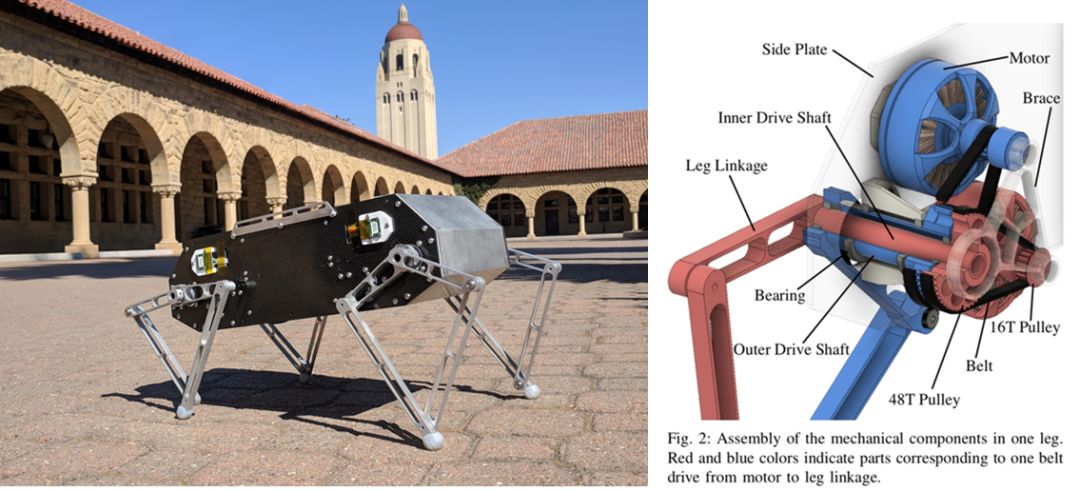
右图为其特殊的同轴结构:1、节省空间,降低重量。这两个电机通过16T滑轮和48T滑轮之间的6mm宽、3mm间距的GT2皮带将功率传输到同轴轴(分别驱动红色内杆转动和蓝色外杆转动)。2、腿可以在任意方向上连续旋转。不像super mini Cheetah的腿部结构,同轴机构使两连杆可以实现360度旋转,便于后空翻的实现。 Doggo还采用3:1减速比皮带轮传动(类直接驱动QDD),此外,其特殊的腿部结构就和弹簧一样,便于能量补偿。
二、MIT Mini Cheetah:

主流的双手肘式:四条腿的膝盖朝向后方,这样的设计可以增大其腿部的工作空间。单腿自由度的分配是Roll-Pitch-Pitch,另外,其驱动器上置,可以减少运动时的惯量影响。
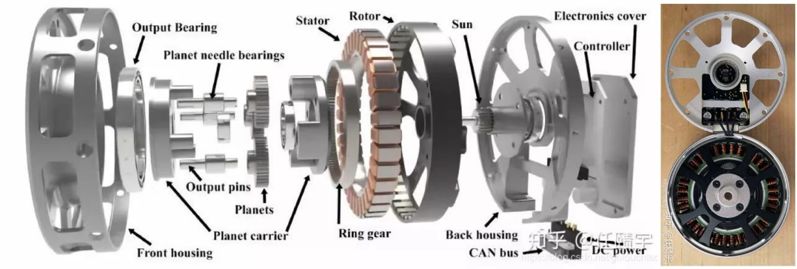
精巧的本体驱动器设计: Mini Cheetah在设计的时候将递减速比行星齿轮组和大扭矩密度的电机以及磁编码器整合到一起,组成本体驱动器。这样不仅可以带来大扭矩密度和高反向驱动力等好处,还节省了空间使整体看上去更加简洁干净。
三、Opendog:
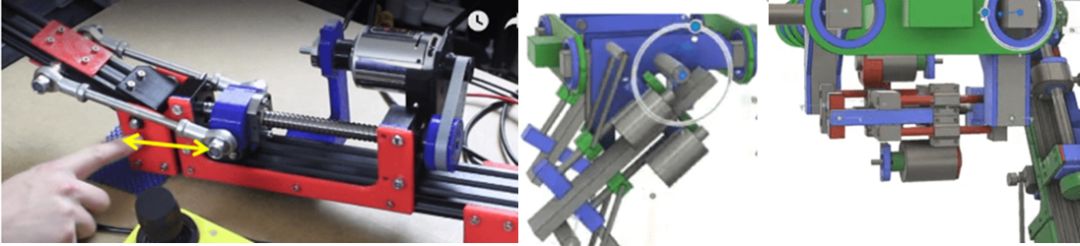
以上分别是Opendog小腿(左图)、大腿(中间)和胯部(右图)的运动,每条腿的自由度分配也是RPP型,特点是它每个自由度的运动是利用滚珠丝杠来完成的,不过这样的设计会带来运动上的局限性,另外还有身形庞大复杂和噪声较大的不足之处。
四、哈工大舵机四足狗:

特点:1、结构简单小巧。2、RPP型自由度分配。3、膝关节等转动直接采用舵机控制。好处就是舵机便宜而且较轻,控制简单。
以上是哈工大一名学生制作的一款舵机四足狗,目前可以实现灵活的全向移动和三轴转动,动作流畅度已经达到了很高的水平。值得一提的是,它还增加了足端力反馈,具备了IMU自稳功能,虽然反应速度不是特别的灵敏(这是舵机自身性能问题)。

舵机四足目前的限制还是挺多的,例如舵机的响应速度较慢,市场上普通的舵机能提供的扭矩比较小且反馈精度不佳。倘若在这些方面上能得到提升,舵机四足或许能实现更高难度的动作例如上楼梯等。
感谢阅读
如果有更多建议请联系:lair@aiit.org.cn
或
关注 LAIR的公众号:PKU-LAIR

北京大学情感智能机器人实验室(Laboratory for Affective Intelligent Robotics, LAIR)成立于2017年,以赋予机器人真正的智能和情感为发展目标。LAIR 位于北京大学校本部的实验室注重学术研究,位于北京大学信息技术高等研究院(杭州)的实验室注重科技开发。
由于人类的交流和社会交往总是包含情感因素,因此LAIR致力于使机器人能够与人们进行含有情感的互动,使机器人能够识别人类情感,能够将自己的情感状态传达给人,更能够正面影响人的情绪,使机器人能够像人一样理解与表现。
我们相信,在未来的生活中,情感智能机器人将不可或缺,在家庭、安全、教育、商业、健康等领域中都将发挥重要的作用。
END


